網(wǎng)站怎么做二級域名網(wǎng)站友情鏈接的作用
什么是數(shù)字圖像處理
改善圖像信息,便于作出解釋
方便對圖像傳輸,儲存,方便機器理解
什么是數(shù)字圖像
(1)模擬圖像:連續(xù)二維函數(shù) f(x,y)表示,其中 x,y 是平面坐標(biāo),f 代表圖像在某點的某種性質(zhì)的數(shù)值
(2)數(shù)字圖像:對模擬圖像red:離散化的結(jié)果
r 表示圖形的行,c 表示圖像的列,I 表示離散后的 f,可以用矩陣或者數(shù)組來描述數(shù)字圖像
像素:數(shù)字圖像的元素
數(shù)字圖像處理的任務(wù)
(1)圖像獲取
(2)圖像預(yù)處理
(3)圖像濾波與增強
(4)圖像復(fù)原
(5)彩色圖像處理
(6)圖像壓縮
(7)圖像分割
(8)圖像描述與識別
機器視覺
用機器來模擬視覺,使用算法對于采集到的圖像進行分析處理,并做出合適決策
計算機視覺側(cè)重于對于理論的研究,而機器視覺側(cè)重于對于實際場景的使用,強調(diào)算法的重要性
一個完整的機器視覺系統(tǒng)包括:
(1)光學(xué)系統(tǒng)
(2)圖像采集模塊
(3)圖像處理系統(tǒng)
(4)交互界面
光學(xué)系統(tǒng):通常包括光源,相機和鏡頭,突出被拍攝物體的特征,方便后期處理
圖像采集模塊:使用圖像采集卡,將來自相機的模擬信號或者數(shù)字信號轉(zhuǎn)為圖像數(shù)據(jù)流
圖像處理系統(tǒng):通過視覺處理軟件對于圖像進行多種運算,并對得到的特征進行檢測,定位,測量等處理
交互界面:顯示最終的結(jié)果
工業(yè)應(yīng)用中機器視覺的特點
(1)綜合技術(shù)
(2)實用性
(3)實時性
處理基礎(chǔ)
圖像感知與獲取
通過傳感器將輸入能源變?yōu)殡妷?#xff0c;再進行數(shù)字化處理
圖像取樣與量化
大多數(shù)傳感器的輸出是連續(xù)電壓波形,為了產(chǎn)生圖像,需要把連續(xù)的模擬信號轉(zhuǎn)為離散的數(shù)字信號
取樣:圖像空間坐標(biāo)的數(shù)字化
量化:對于圖像函數(shù)值 f的數(shù)字化
數(shù)字圖像只是對于真實場景的近似,取樣點越多,量化的灰度級越多,圖像質(zhì)量越好
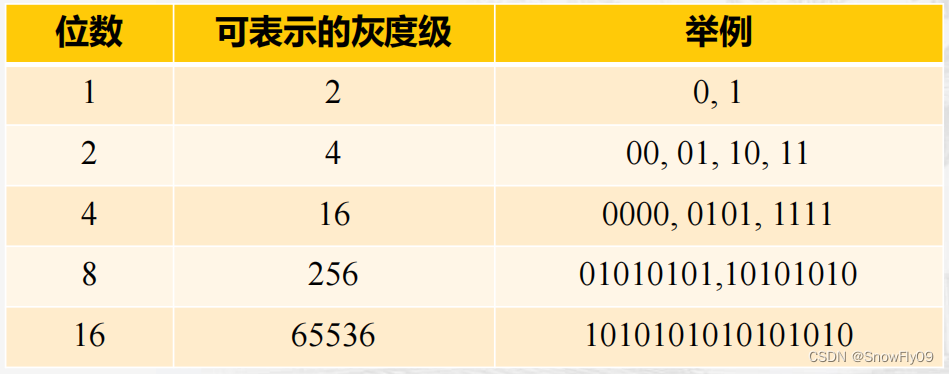
對于表示模擬圖像的函數(shù) f ( s , t ) f(s,t) f(s,t),通過采樣和量化,轉(zhuǎn)化為 M 行 N 列,離散灰度級數(shù)為 L 的數(shù)字圖像,其中 M、N 必須為正整數(shù),灰度級數(shù) L = 2 k L=2^k L=2k,等間隔
(1)灰度跨越的值域為動態(tài)范圍: 圖像中最大可度量灰度 圖像中最小可檢測灰度 \frac{圖像中最大可度量灰度}{圖像中最小可檢測灰度} 圖像中最小可檢測灰度圖像中最大可度量灰度?
(2)可度量灰度的上限取決于飽和度,超過了飽和度的灰度級將被剪切掉;下限取決于噪聲,因為噪聲掩蓋了可檢測的最低真實灰度級
(3)對比度:圖像中最高的灰度級與最低的灰度級之間的灰度差
L = 2 k L=2^k L=2k,儲存數(shù)字圖像所需要的 bit 數(shù)為: M ? N ? k M*N*k M?N?k
E.G.對于 32*32 的二值圖像(黑白兩種元素的圖像)
k=1,則其大小為: 3 2 2 ? 1 = 1024 b i t s = 256 b y t e s 32^2*1=1024bits=256bytes 322?1=1024bits=256bytes
空間分辨率
圖像的空間分辨率代表著對于圖像中可辨別的最小單位的度量,由采樣方式確定:
(1)視覺任務(wù):像素尺寸
(2)平面設(shè)計:DPI(dots per Inch)
灰度分辨率
灰度分辨率則是指在灰度級中可以分辨的最小變化,灰度分辨率越大,圖像的細節(jié)區(qū)分度就越好
圖像中灰度級變小會如何:圖像的明暗過度會越來越明顯,同時可能出現(xiàn)一些不屬于正常物體邊緣的偽輪廓,呈現(xiàn)細小山脊?fàn)?#xff0c;是灰度級不夠平滑造成的
圖像內(nèi)插
用于圖像的放大縮小,旋轉(zhuǎn)矯正等任務(wù),同時也可以相對應(yīng)的改變圖像的分辨率
插值:通過已知的圖像數(shù)據(jù)來對改變后的位置數(shù)據(jù)進行處理
最近鄰插值
將原圖中最相鄰的灰度值賦給新位置,當(dāng)對于邊緣來說可能造成嚴重的失真
插值過程:
(1)對于一張 500x500 的圖像,將其放大為 750x750
(2)采用原圖的間隔創(chuàng)建 750*750 的網(wǎng)格
(3)將新圖像收縮到和原圖相同的大小,此時新網(wǎng)格的單位邊長小于原網(wǎng)格
(4)對每個新網(wǎng)格中的點,找到其最近的原網(wǎng)格的點為其賦值
(5)將新網(wǎng)格擴展到 750x750 的大小,此時就獲得了放大后的圖片
總體來說,過程就是:放大-縮小-放大

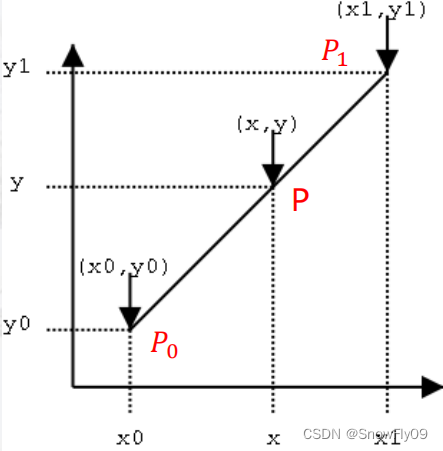
線性插值
已知點(x0,y0)與 (x1,y1),計算[x0,x1]區(qū)間上的任意直線上一點的插值
y = x 1 ? x x 1 ? x 0 ? y 0 + x ? x 0 x 1 ? x 0 ? y 1 y = \frac{x_1-x}{x_1-x_0}\cdot{y_0}+\frac{x-x_0}{x_1-x_0}\cdot y_1 y=x1??x0?x1??x??y0?+x1??x0?x?x0???y1?
則認為
f ( P ) = x 1 ? x x 1 ? x 0 ? f ( P 0 ) + x ? x 0 x 1 ? x 0 ? f ( P 1 ) f(P) = \frac{x_1-x}{x_1-x_0}\cdot f(P_0)+\frac{x-x_0}{x_1-x_0}\cdot f(P_1) f(P)=x1??x0?x1??x??f(P0?)+x1??x0?x?x0???f(P1?)
雙線性插值
用 4 個最近鄰來估計給定位置的灰度值,相當(dāng)于將 y 軸也算作灰度值插值,就不用考慮需要在直線上的條件,只要在 x,y 構(gòu)成的平面內(nèi)即可
首先還是在 x 方向進行線性插值,獲得兩個輔助點 R1 和 R2,然后再利用這兩個輔助點在 y 方向上插值,從而得到最終的插值結(jié)果
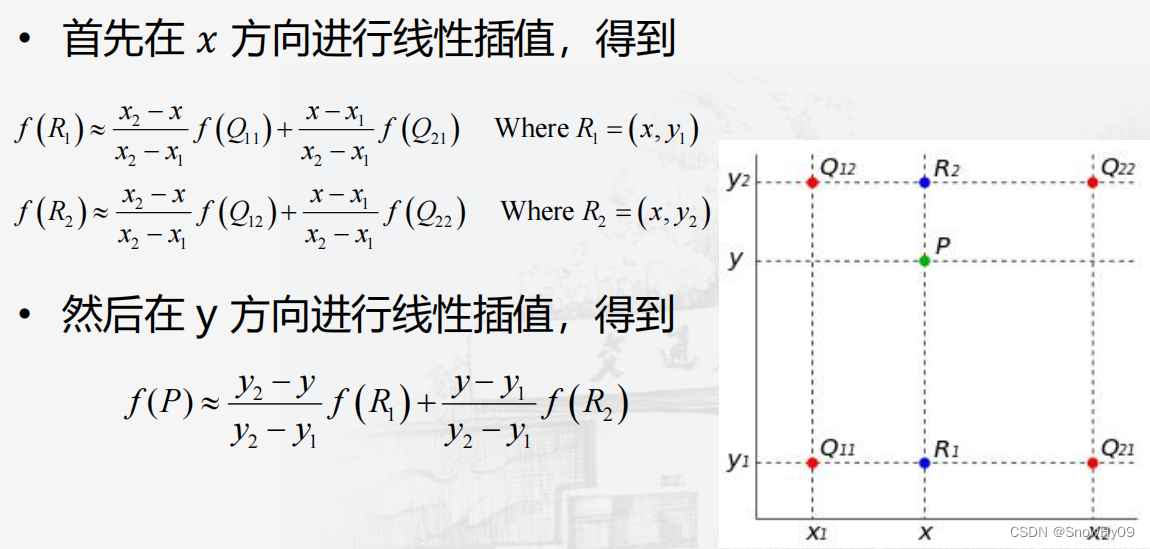
我們也可以推出在三維空間中是三線性插值
雙三次插值
了解即可,采用 16 個最近鄰點來進行計算,效果比雙線性插值更好,但是速度更慢
像素間的基本關(guān)系
主要分為 4 鄰域,D 鄰域,和 8 鄰域

(對于 1 而言)
4 鄰域:2,4,6,8 號格
D 鄰域:3,5,7,9 號格
8 鄰域:4 鄰域+D 鄰域
在灰度級中,我們一般考慮 3 種像素的鄰接方法
(1)4 鄰接:兩個像素互在對方的 4 鄰域中
(2)8鄰接:兩個像素互在對方的 8 鄰域中
(3)m 鄰接(混合鄰接):分為兩種情況:1.4 鄰接 2.兩個像素互在對方的 D 鄰域中,且 4 鄰域的交集中像素值為 0
目的:對于8鄰接,在尋找兩個點的路徑或者計算路徑長度的時候會出現(xiàn)二義性的問題,m鄰接可以去除二義性
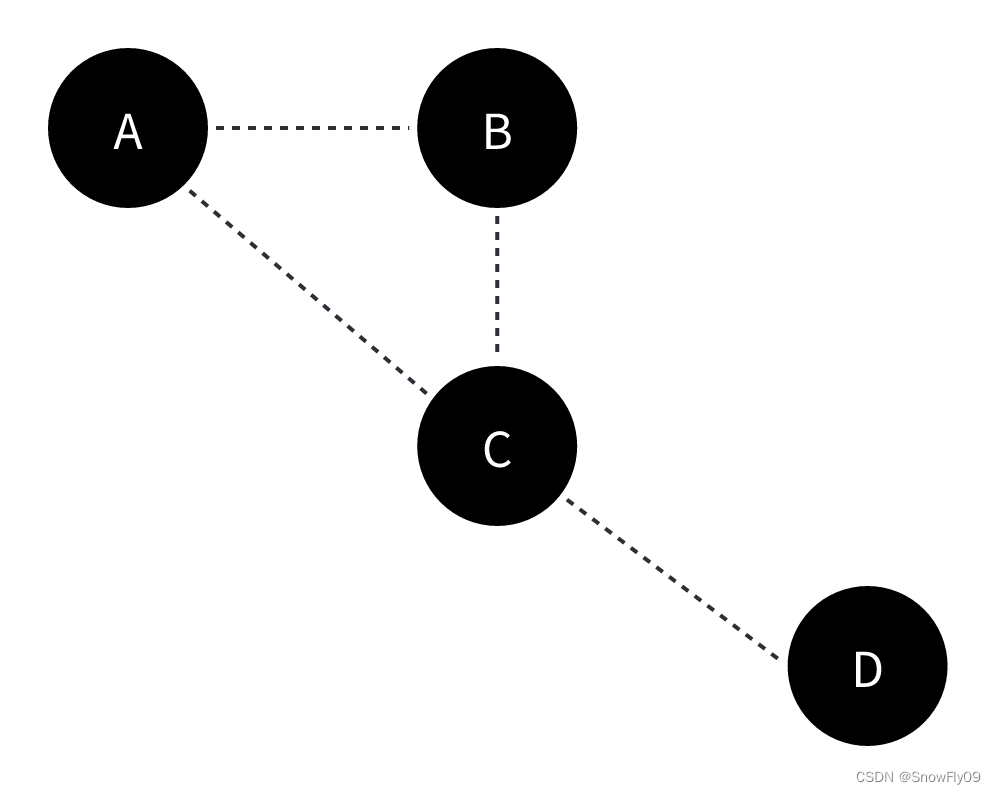
如果使用8鄰接,那么A-D的距離計算就會產(chǎn)生歧義,但是對于m鄰接,A-C不能直接聯(lián)通,因為他們的4鄰域的交集中有B,所以A-D的路徑為A-B-C-D
通路與連通集
對于剛剛我們提到的路徑,我們把其叫做通路,通路的長度即為其包含的像素個數(shù)
(1)如果起始點和終點是同一個點,那么我們就認為這條通路是閉合通路,使用了哪種鄰接方式就被稱為x-通路
(2)給定一個像素集合S,對于任何一個屬于S的像素q,通路中連接到像素q的像素集被稱為S的連通分量
(3)如果S僅有一個連通分量,則S稱為連通集
(4)R為圖像的一個像素子集且剛好構(gòu)成連通集,則將其稱為一個區(qū)域,兩個區(qū)域合在一起成為一個連通集,則這兩個區(qū)域稱為鄰接區(qū)域
前景與背景
一幅圖像中有k個不連接的區(qū)域,它們均不與圖像的邊界相接,令 R u R_u Ru?代表k個區(qū)域的并集, ( R u ) c (R_u)^c (Ru?)c表示其補集
則稱 R u R_u Ru?為前景,$(R_u)^c為背景
圖形的邊界
對于圖像中的一部分區(qū)域,已經(jīng)定義了其鄰接方式,若在此鄰接方式下,區(qū)域的某像素的鄰接區(qū)域中出現(xiàn)背景像素,則稱該像素為該區(qū)域的邊界
對于距離的定義
在圖中,對于像素有:
(1)不是同一個點之間的距離必然大于0
(2)A到B的距離等于B到A的距離
(3)兩邊之和大于第三邊
歐式距離
就是傳統(tǒng)的計算距離的方式,勾股定理
D4距離(城市街區(qū)距離)
D 4 ( p , q ) = ∣ X p ? X q ∣ + ∣ Y p ? Y q ∣ D4(p,q) = |X_p-X_q|+|Y_p-Y_q| D4(p,q)=∣Xp??Xq?∣+∣Yp??Yq?∣
D8距離(棋盤距離)
D 8 ( p , q ) = m a x ( ∣ x p ? x q ∣ , ∣ y p ? y q ∣ ) D8(p,q) = max(|x_p-x_q|,|y_p-y_q|) D8(p,q)=max(∣xp??xq?∣,∣yp??yq?∣)
Dm距離
兩點間的最短通路